A dynamic lighting designer with 8 years experience and countless shows
I've done lighting design for various organizations including but not limited to: Princeton Day School, Princeton University, McCarter Theater, Rutgers University, Edinburough Fringe Festival, Stanford University. Have worked with proffesional designers Josh Benghiat, Norman Coates, Michael Ramsaur.
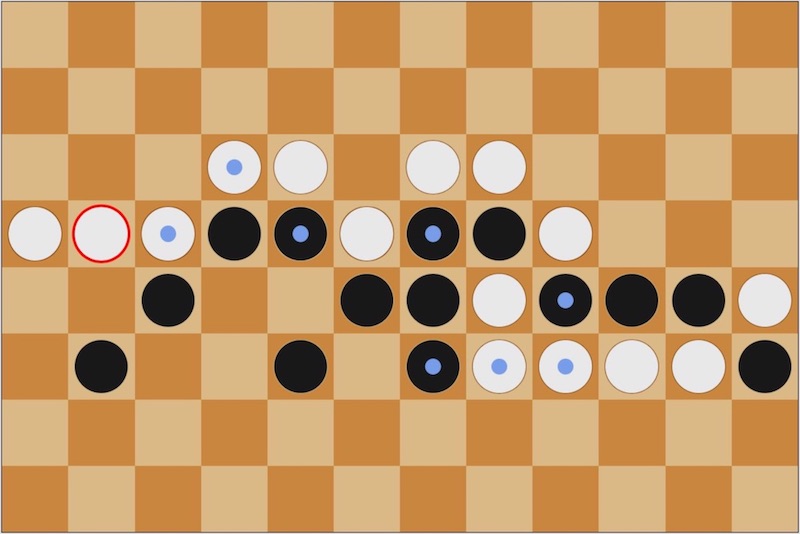
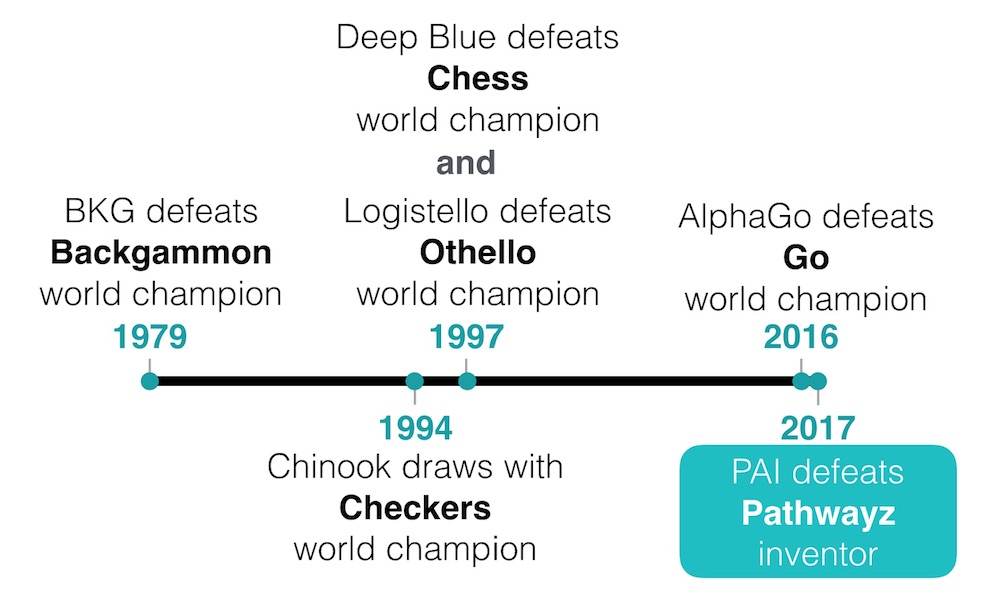
Pathwayz AI
Building an AI that can beat the creator at their own game
Course: CS 221
Design Goals: Nikhil Prabala, Louis Lafair, and I set out to make the world's first and only AI for Pathwayz, a 2 player board game invented by Louis when he was 11. (You can learn more about pathwayz at pathwayzgame.com.) Our goal was simple: To beat the creator at his own game. We iterated through several different AI algorithms and techniques to try to devise a powerful enough AI to accomplish the task. Using a narrowing beam minimax with features trained using TD-learning, we were able to create a player that could beat Louis in 3 out of 5 games. (It defeated Nikhil 5–0 and myself 4–1). You can read more about our process and the algorithms here. And you can play Pathwayz against a friend or one of our AIs here!
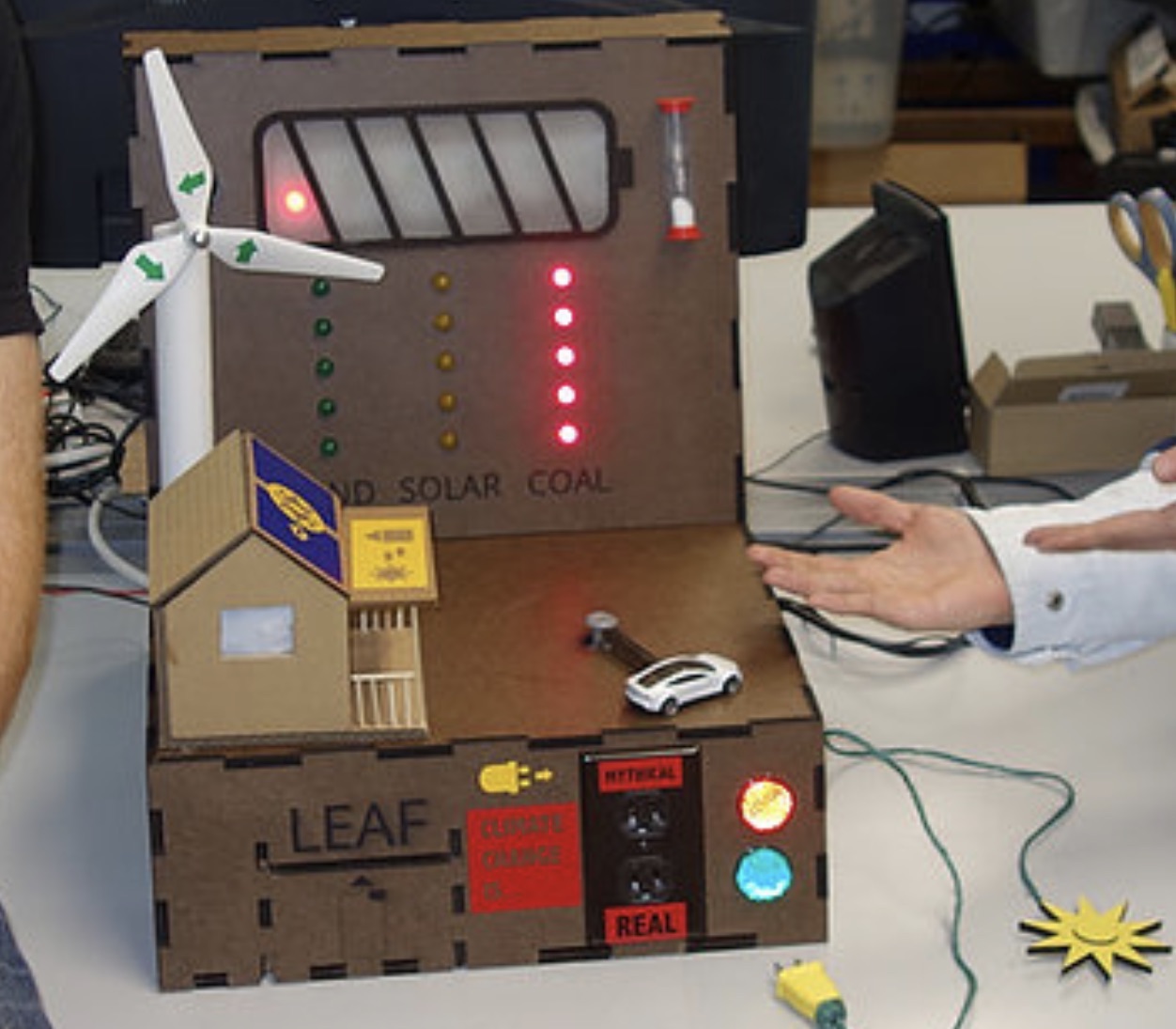
Smart Spot
An innovative control system for intelligent lighting fixtures
Together with LITES, we developped the Smart Spot sytem. This is a software package that allows a user to take control of moving head fixtures from a lighting console, and manually control them as follow spots. This allows for more dynamic and creative lighting design opportunities, which we hope to utilize in the future. My primary contribution to the system was deriving the algorithms to calibrate the fixtures and determine what angles they needed to point at to hit the specified location.
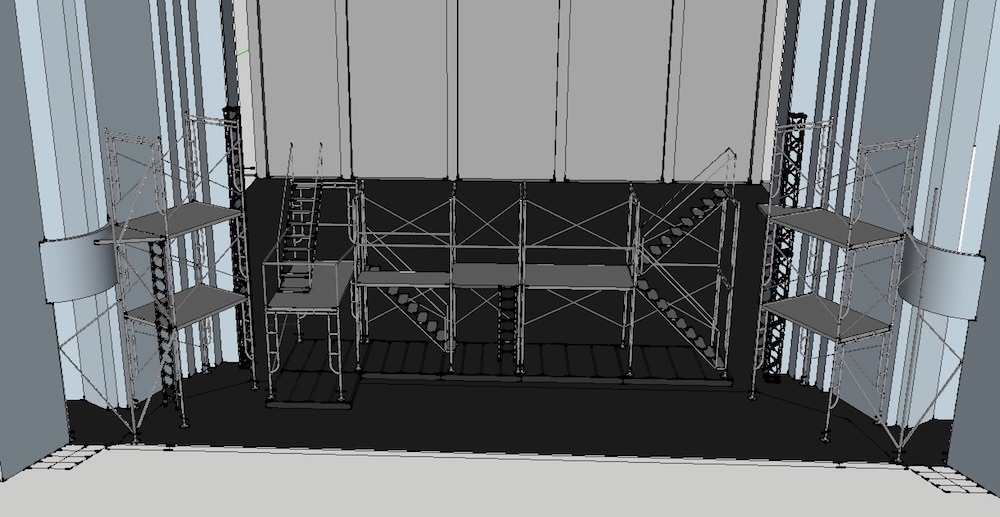
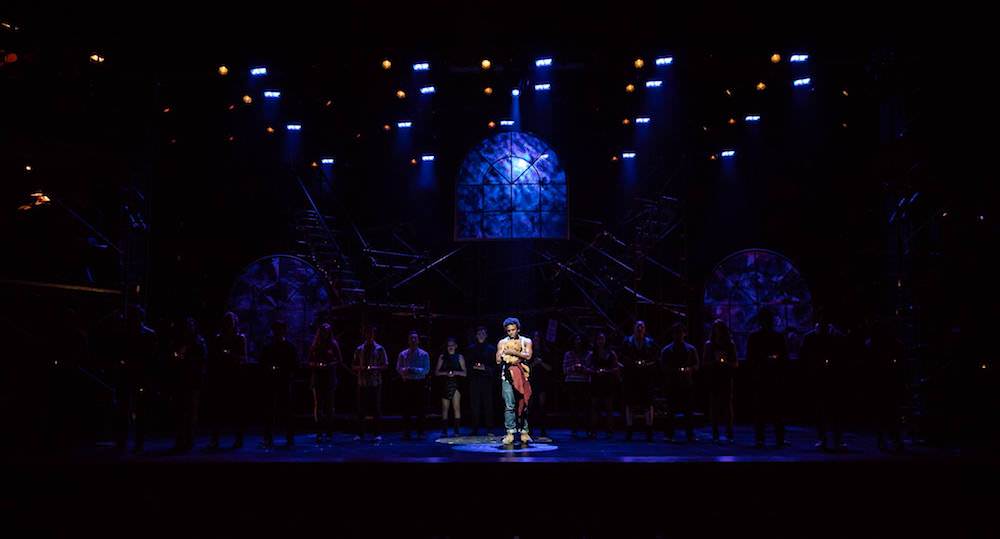
Design Goals: Create an gritty, urban, dynamic playground for the actors that evoked New York City in the 1980s/1990s and could meld and change seamlessly between scenes.
Outcome: I chose to use construction scaffolding to create towers on Memorial Auditorium's stage which the actors could climb on, decorate, interact with in various ways––from riding on the subway to hanging out on the fire escape to conducting a performance. Additionally, with the LITES friction drive system that I developped, we were able to move two of the towers across the stage to dynamically change scenes in an instant, without taking the audience away from the action.
Web Design
Self-taught web designer, experience with html, javascript, CSS, bootstrap, SQL
A massive, versatile, theatrical LED video wall on a budget
Together with LITES, we built an inexpensive, modular LED video wall to be used in a variety of activities from concerts, to theatrical productions, to art installations. The wall is made up of 50 4’ x 4’ panels for a total assembled size of 20’ x 40’ and an effective resolution of 200 x 100 pixels. Additionally, this project led to a paper published in TD&T.
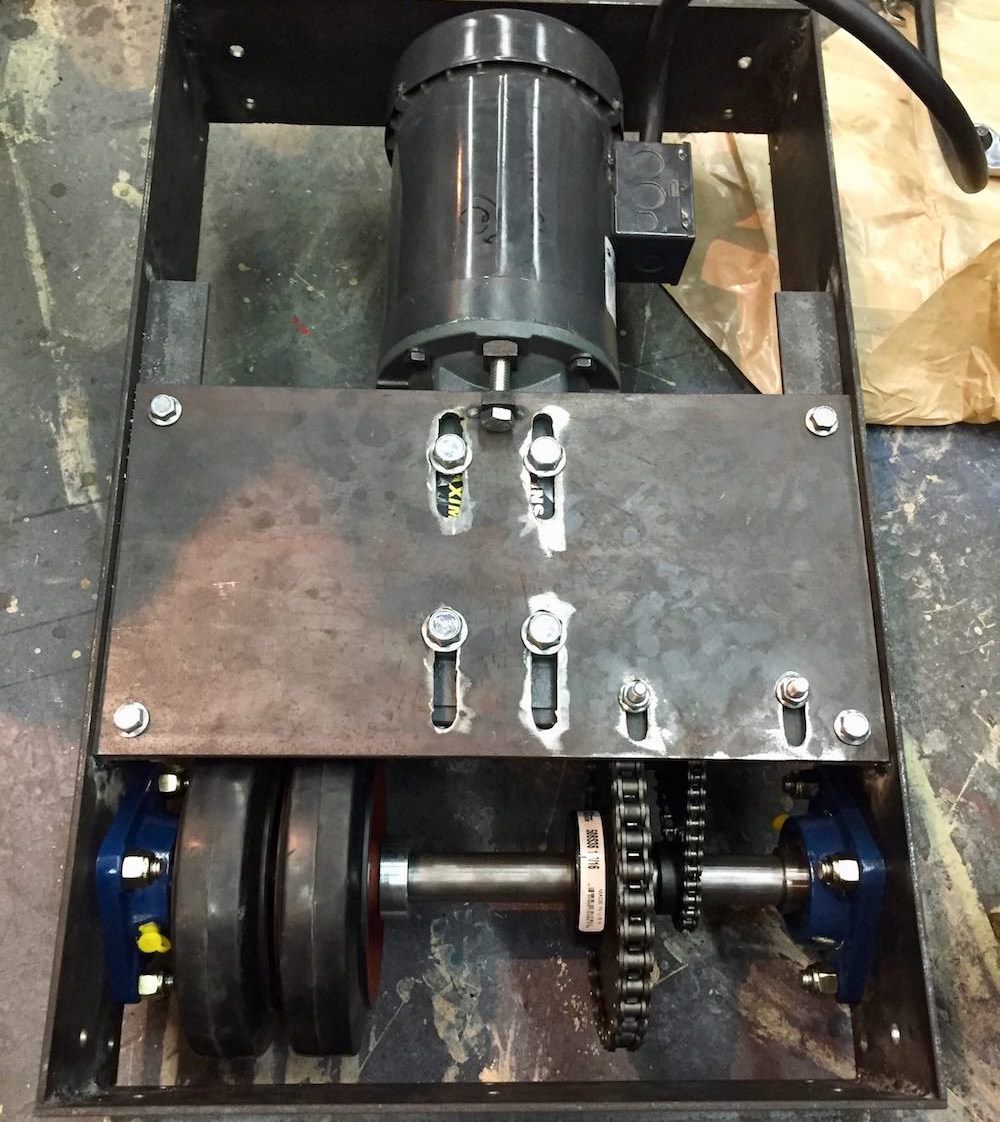
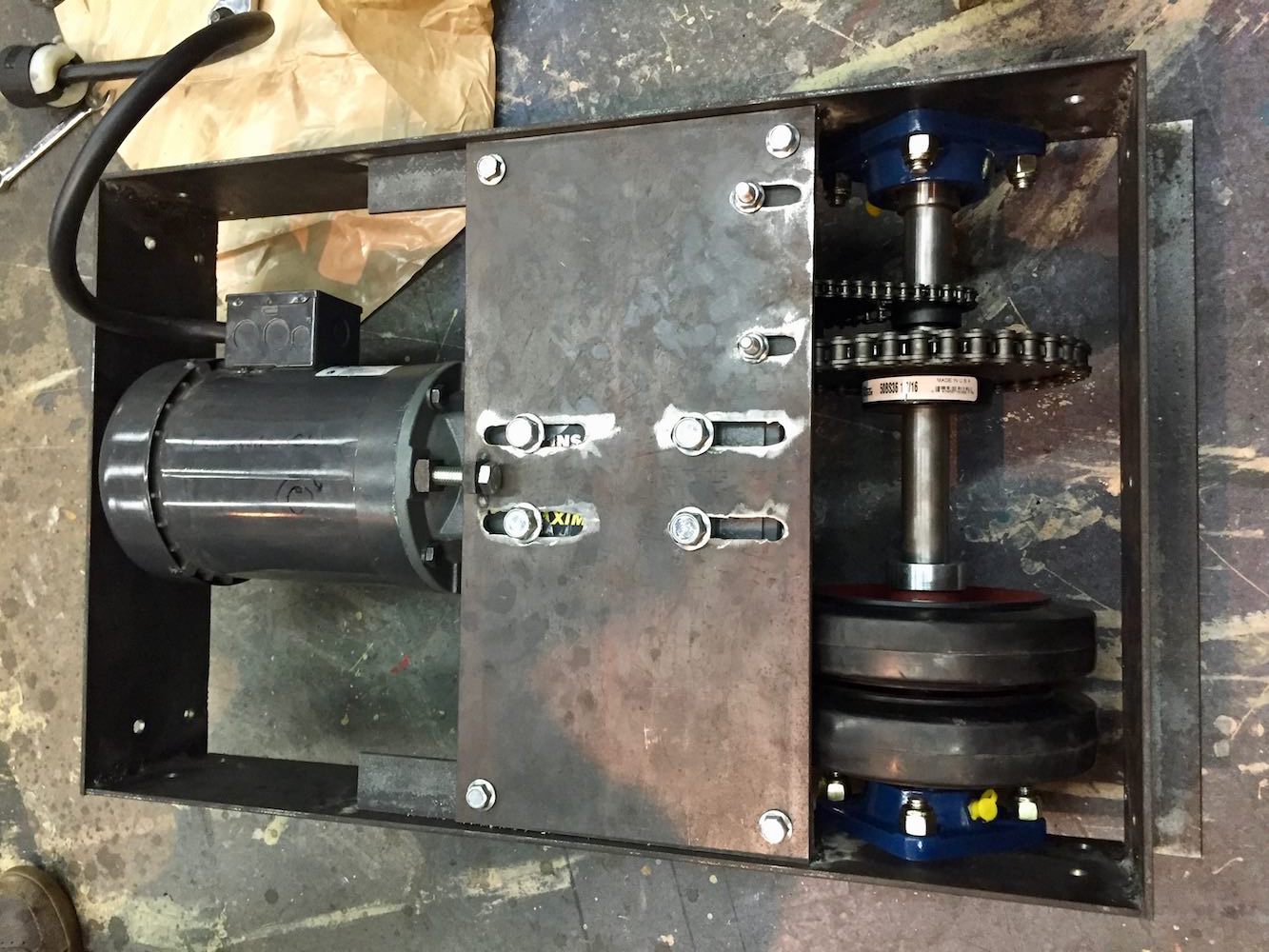
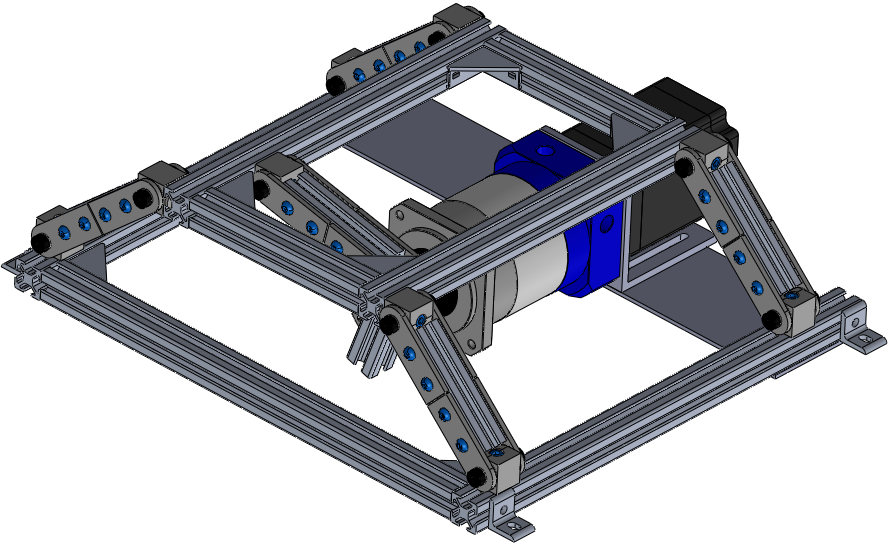
A simple, modular, flexible theatrical automation system.
Group: LITES
Design Goals: Versatility; we wanted to develop a compact drive unit that could be attached under platforms or under set pieces (e.g. furniture) with little modification. Furthermore, we wanted the ability to install two of these drives on a platform, giving us both axial and rotational motion. This opened up a wide range of dynamic uses and required very little preparation to install. It also provided the flexibility to move anywhere on stage.
Processes Employed: SolidWorks CAD, MIG welding, Milling, Electrical Work
Material: Mild Steel
Biggest Challenges: The first large challenge was to design the system around preexisting 3 phase 1HP motors so that we could mount the motors, mount the system under a platorm, and have enough clearance with the ground. The biggest challenge was to program the platforms to behave as intended. To do this, I wrote a Matlab script to simulate how different inputs (operated by a PLC based control system) would affect the outcome of the movements. A simulation video can be seen below, along with the actual movement of the platforms.
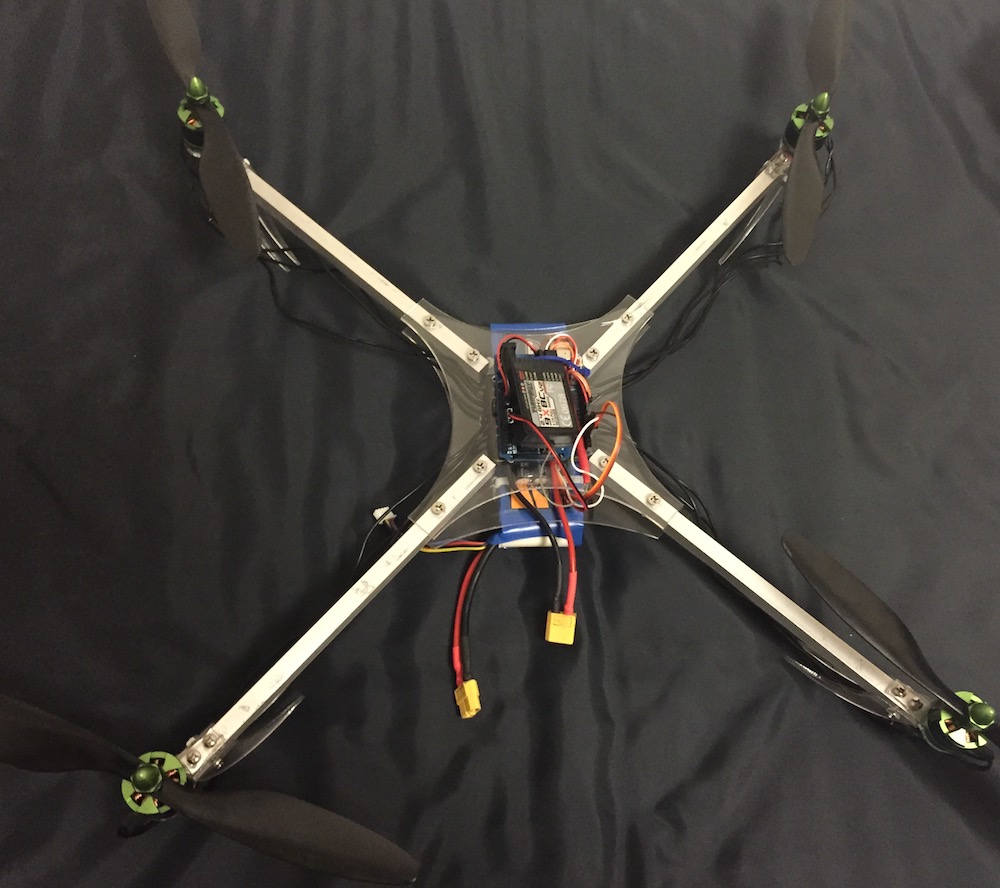
Design Goals: Design and build from scratch, a remote controlled, arduino powered quadcopter
Go-Kart
A simple, energetic, all electric go-kart
Course: High School Independent Senior Project
Design Goals: Design and build an electric go-kart from scratch in 5 weeks for $500
Processes Employed: MIG Welding, Metal Forming, Electrical Work
Material: Mild steel
Stats: Top speed of 15mph, drive time of 30 mins
Convolution
A beautiful and interactive digital clock
Course: ME 203
Design Goals: The helical form was inspired by the waves of the Narragansett Bay to which I would fall asleep. More than that, I wanted the product to adapt to its surroundings, thus I incorporated a ambient light sensor which changes the brightness of the time, and allows for the user to interact with the product.
A tactile, metamorphosing lamp to control light flow
Course: ME 318
Design Goals: Inspired by blooming flowers, glowing fabric, and the iris mechanism, I wanted to create a soft, tactile, dynamic lamp that could control how light flowed in a room. The result became 12 white shells around a ring that can rotate in unison to change the aperture out of the top and bottom of the lamp. The light can either directly light the room below as a focused pool of light, could be bounced upward and off the ceiling to create a soft glow throughout the room, or could mix the two together in a spectrum of positions.
Processes Employed: CNC routing, vacuum forming
Material: Modulan, styrene, acrylic, mild steel
Poppasquash
An elegant bottle opener inspired by geography and history
Course: ME 318
Design Goals: We were told to design and machine a bottle opener inspired by a myth or legend. I chose the story of Poppasquash penninsula in Bristol RI, when natives were able to save their tribe from colonists by hiding the women and children out on an easily defendable penninsula. The penninsula is also where I spent a number of summers exploring, sailing around, and relaxing. In homage to the legacy of the land, I based the design of the bottle opener off of the geography of the peninsula, using a the natural coast line to open bottles.
Processes Employed: CNC milling
Material: Stainless steel
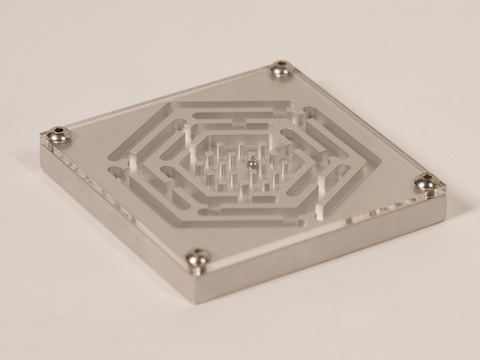
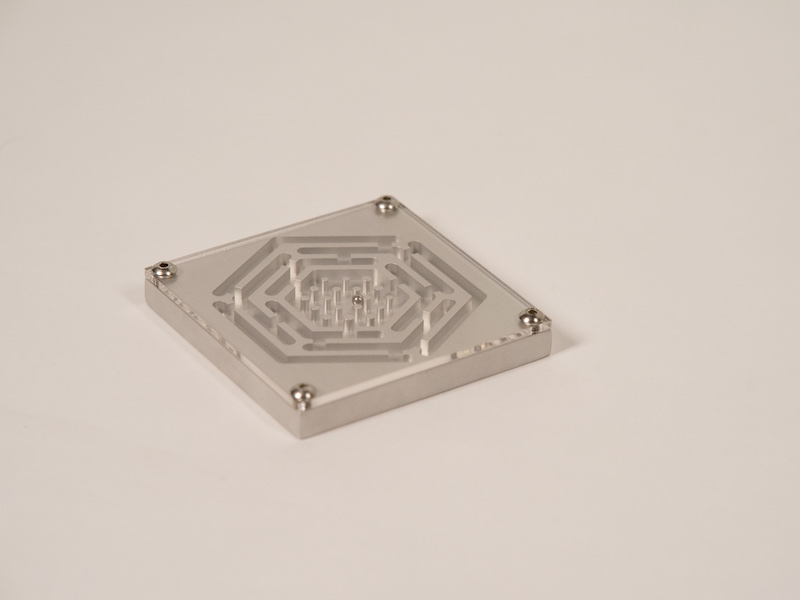
Hexamaze
A tricky spin on a classic marble maze
Course: ME 318
Design Goals: We were tasked with designing and machining a marble maze out of aluminum. My maze made use of tight tolerances to make false gaps where the ball just can't slip through.
Processes Employed: CNC milling, laser cutting
Material: Aluminum, acrylic
Autonomous Car Controller
A speedy controller to drive a car by itself
Course: ME 227
Design Goals: We had to develop a controller that would use GPS and car telemetry to drive an Audi TT around a parking lot as fast as possible (with limits on acceleration profiles). We developed both a lookahead and steer controller for steering, as well as a simple feedback controller for acceleration.
Whitecap
A simple medallion to test CNC g-code programming
Course: ME 318
Design Goals: To get a good grasp of how a CNC mill operates, we operated the mill to engrave a logo of the Product Realization Lab on one side of a medallion. Then we had to design a simple pattern to be engraved onto the backside by hard coding g-code commands to a CNC mill. The pattern was inspired by the waves near my home in Rhode Island.
Processes Employed: CNC engraving
Material: Brass
Bolt
An elegantly simple bolt action pen
Independent Project
Design Goals: Inspired by Jeremey Schmidt's video, I decided to make a bolt action pen. I designed the pen in Solidworks, and using a lathe and mill to machine stainless rod and screws into a sleek, weighted pen with an addictingly fun mechanism.
Processes Employed: Turning, milling
Material: Stainless steel
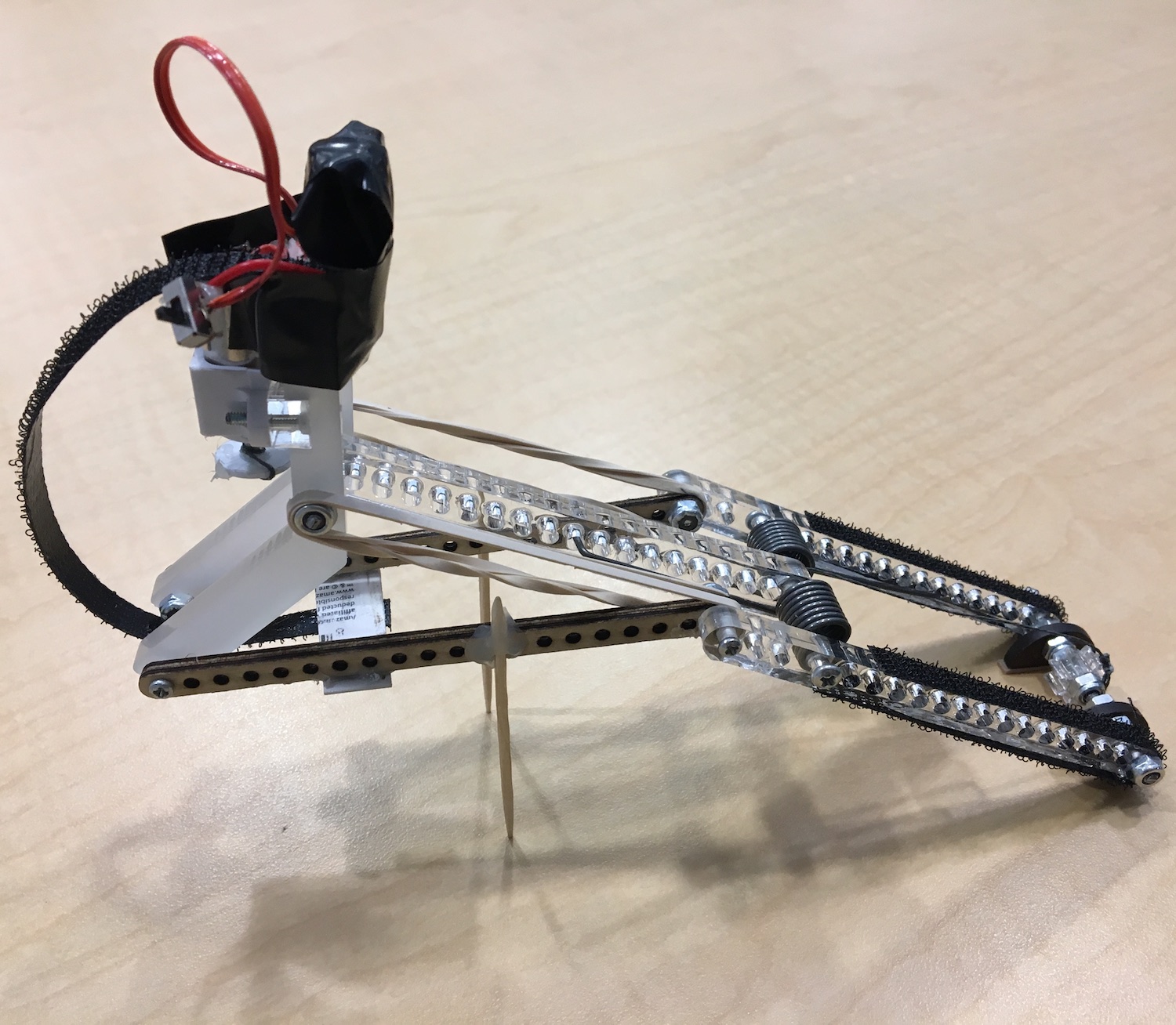
Jumping Robot
A bio-inspired autonomously jumping robot
Course: ME 112
Design Goals: Our team was told to design a bio-inspired robot that could wind up and jump 1 meter vertically and stick to a velcro surface. We designed a robot using a leg like linkage, which a small motor (powered by small batteries) would wind up using a string, storing energy into torsion springs. At a point, the string would release and the robot would jump. The linkage was designed using a matlab simulation to align the path of the linkage through the center of gravity to ensure vertical take off.
Our take on enhancing the performance driving experience
Course: ME 113
Design Goals: Our team worked with Porsche on the question of how to enhance the driving experience for performance minded drivers. We decided to create a drivers seat that can roll side to side in turns to help cradle the driver and create a new sensation while driving. The frame of the seat was made out of aluminum 80/20 extrusions, and was actuated by a stepper motor controlled by an arduino which read accelerometer data to determine when the car was turning. We tested the seat in a car while driving and had positive feedback from participants. This project won the 2018 Fuch's Award from the Mechanical Engineering Department at Stanford.
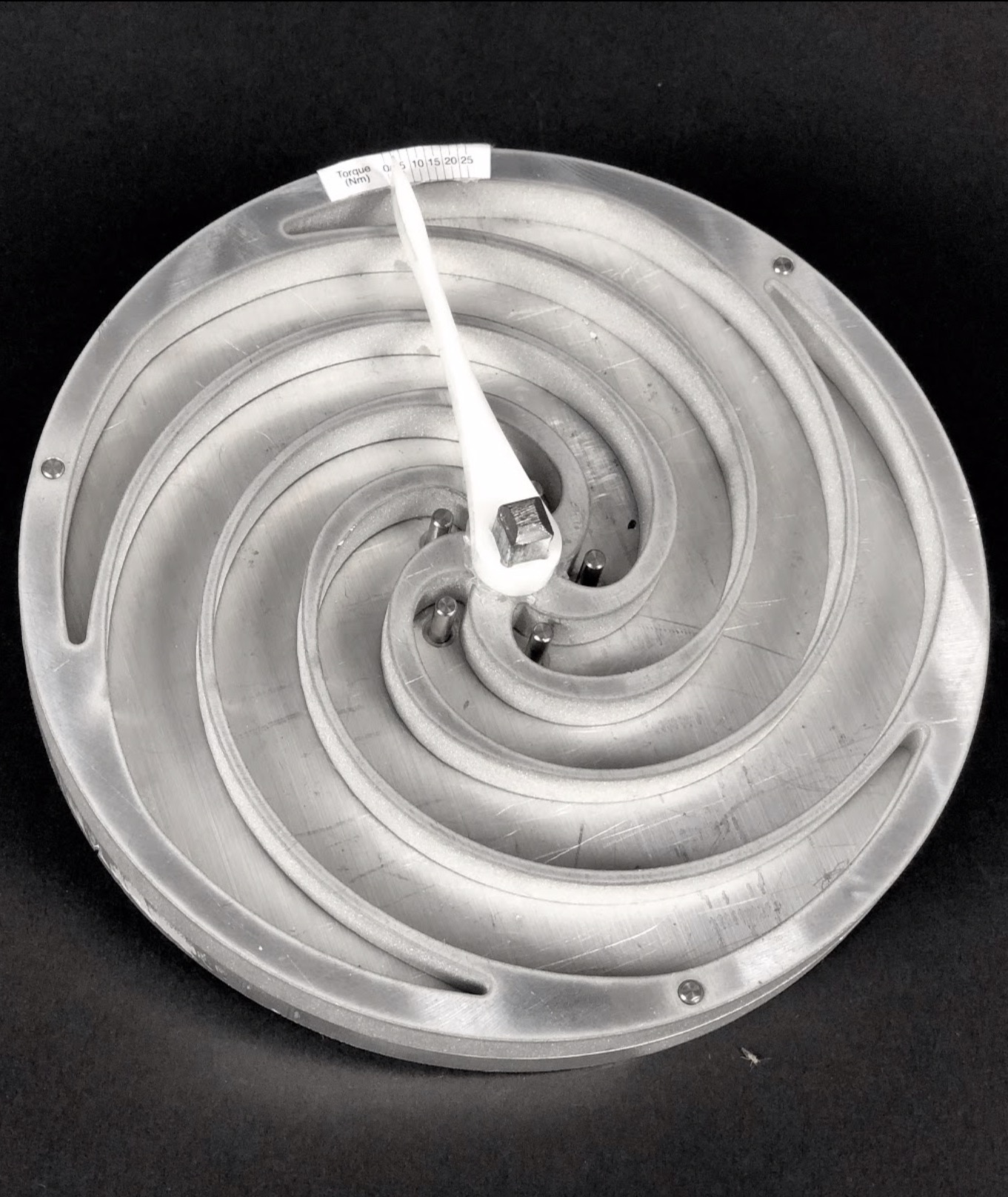
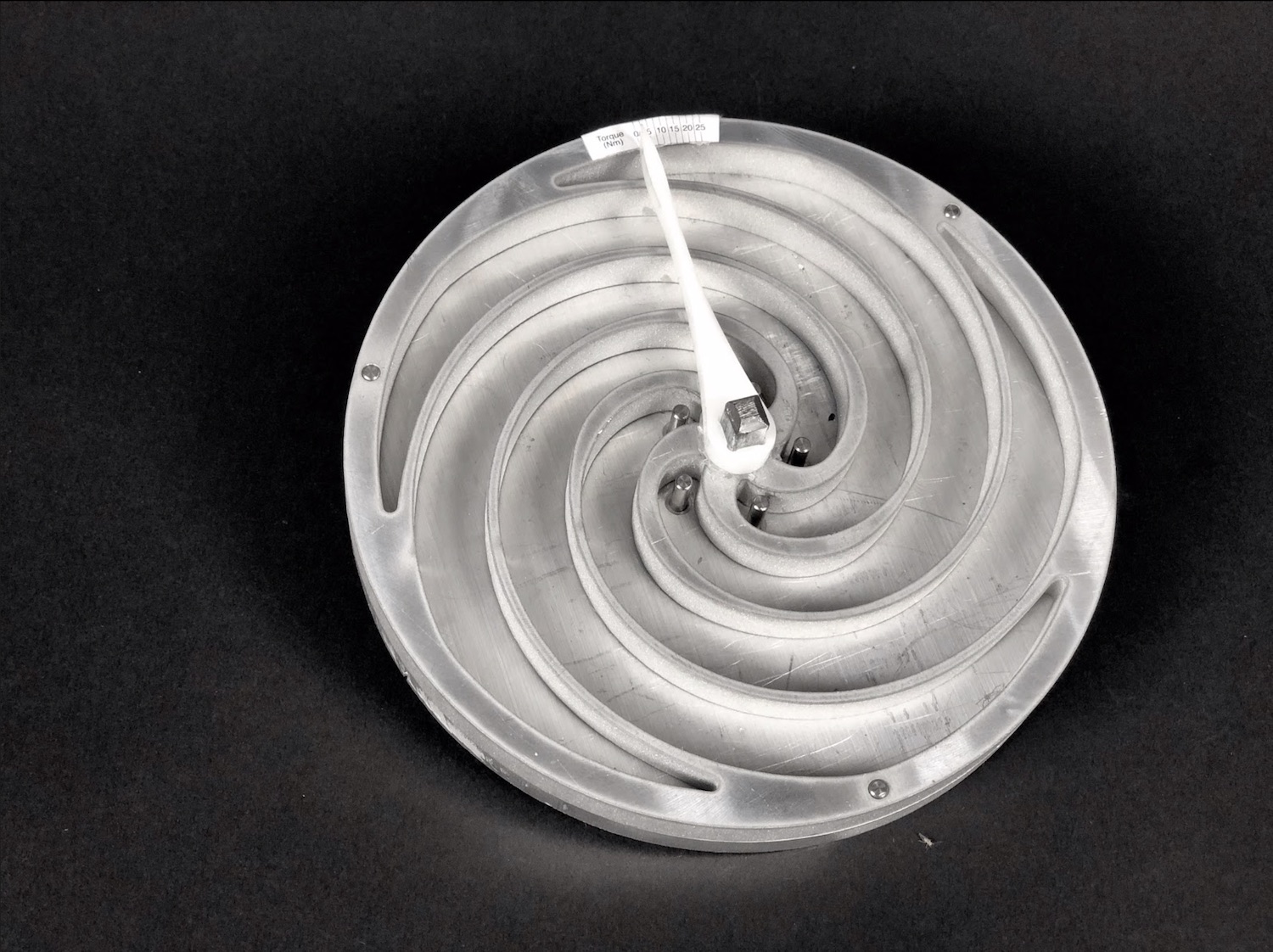
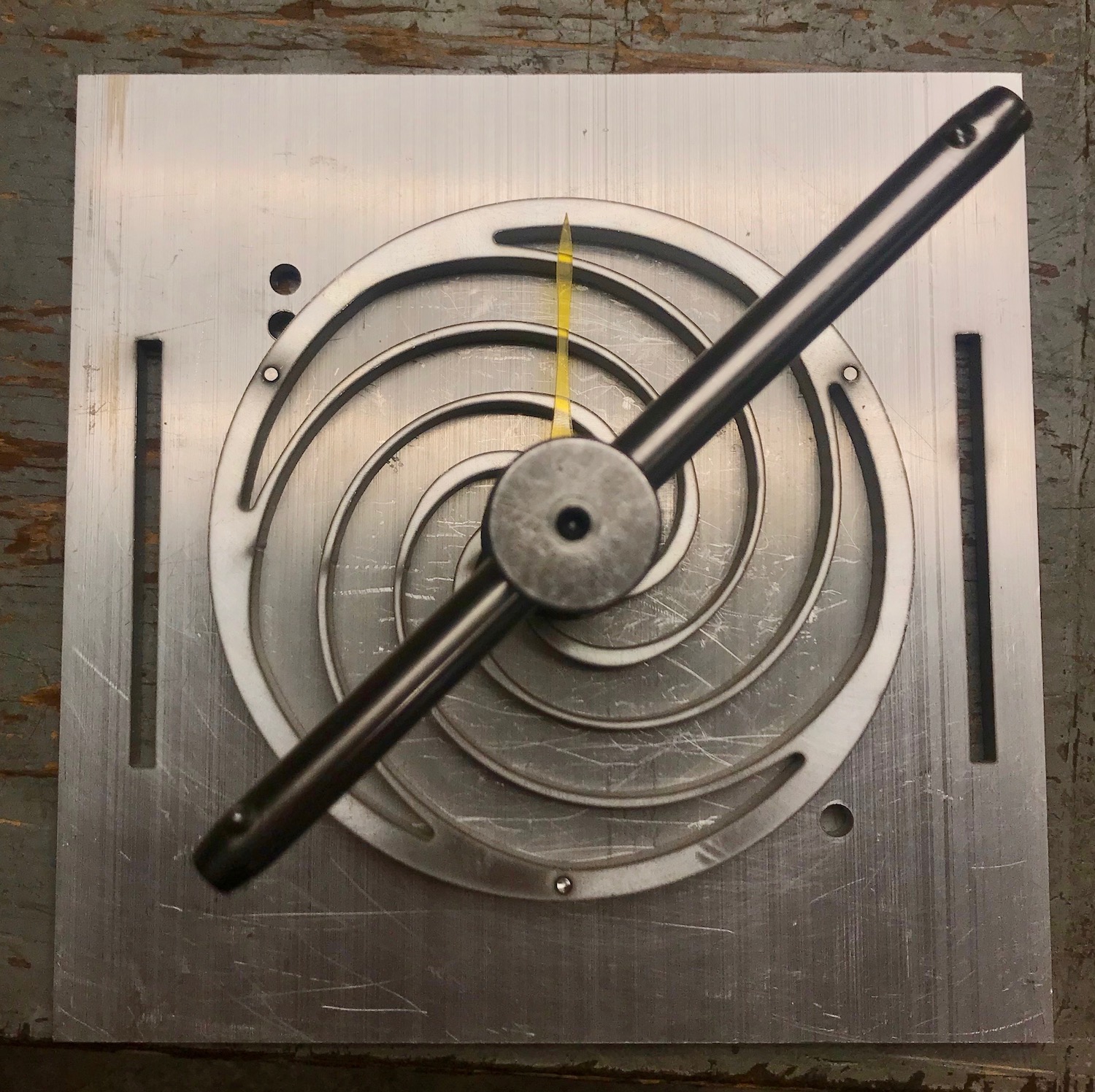
Torqued
A gorgeously function torque measurement flexure
Course: ME 324
Design Goals: We set out to create an novel flexure to measure the torque a bolt or machine screw. We iterated through geometric designs in finite element analysis (FEA) and determined that we would need a material that was flexible enough to have a visual displacement, but given the stresses the flexure would experience, the material would require a high yield strength to prevent yielding under load. We settled on using 7050 aluminum for our flexure, given its good balance of a low Young’s modulus (71.7 GPa) coupled with a high yield strength (490 Mpa). Additionally, 7050 aluminum has a very high fatigue strength (150 MPa after 10M cycles). We optimized the geometry of the flexure given the material choice to handle up to 25 Nm over a displacement of about 10°. The flexure was assembled to a base plate using press fit stainless steel dowel pins. Dowel pins were also press fit into the base plate to act as a hard stop to prevent the flexure from displacing too far and yielding. The flexure was put into a test fixture and calibrated using known torques and measuring the displacement. Analyzing three sets of measurements, we determined the device had a linear relation between torque and angular displacement of 0.0076 rad/Nm ± 0.0003 rad/Nm with R^2 exceeding 0.995 for each trial. We used this relation to develop a scale for the device that has a resolution of 2.5 Nm over a range of 25 Nm.
Processes Employed: FEA, Water Jet Cutting
Material: 7050 Aluminum
Nixie
A simply elegant nixie tube clock
Independent Project
Design Goals: Design and create a simple flat pack enclosure to house an arduino powered nixie tube clock. The result used the burned edges from lasercutting to accent the enclosure and make it an elegant show piece.
Processes Employed: Laser cutting
Material: Birch Plywood
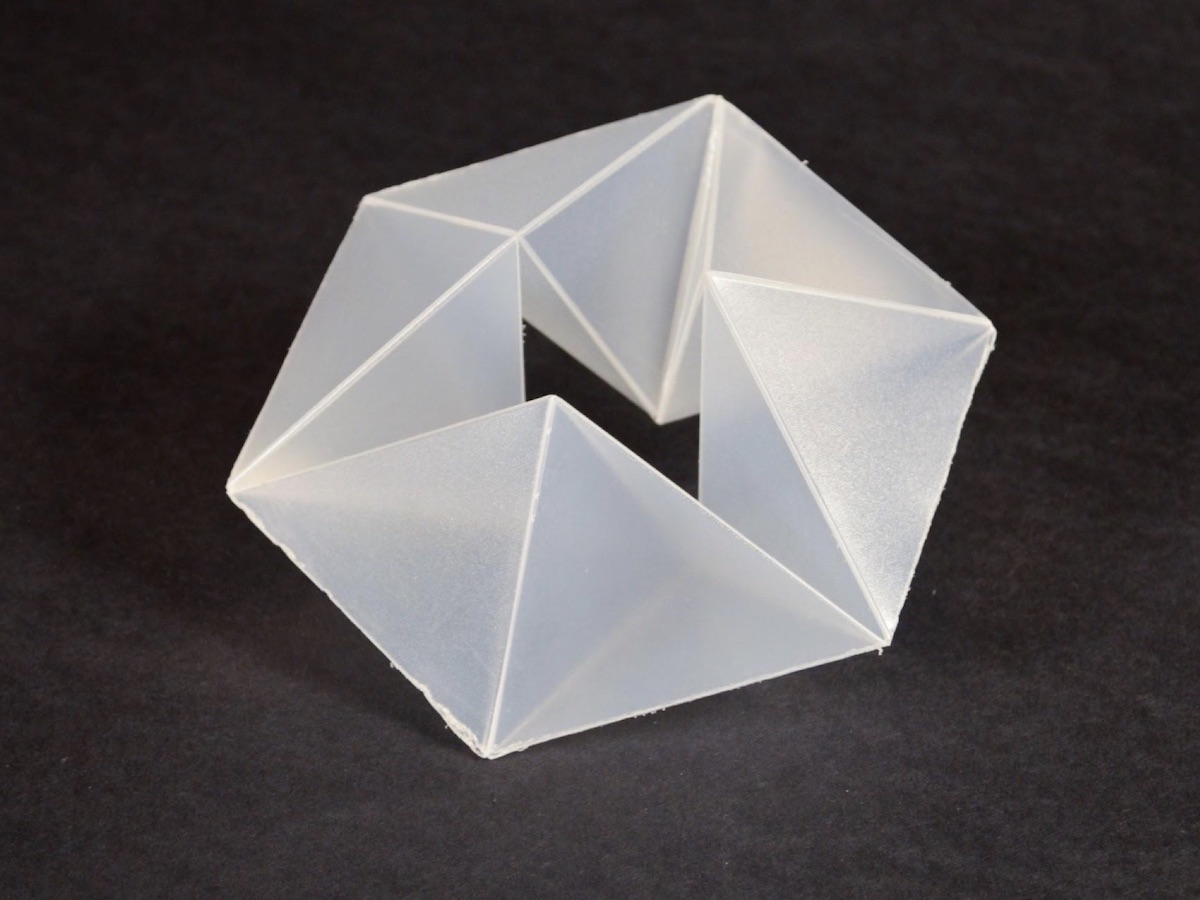
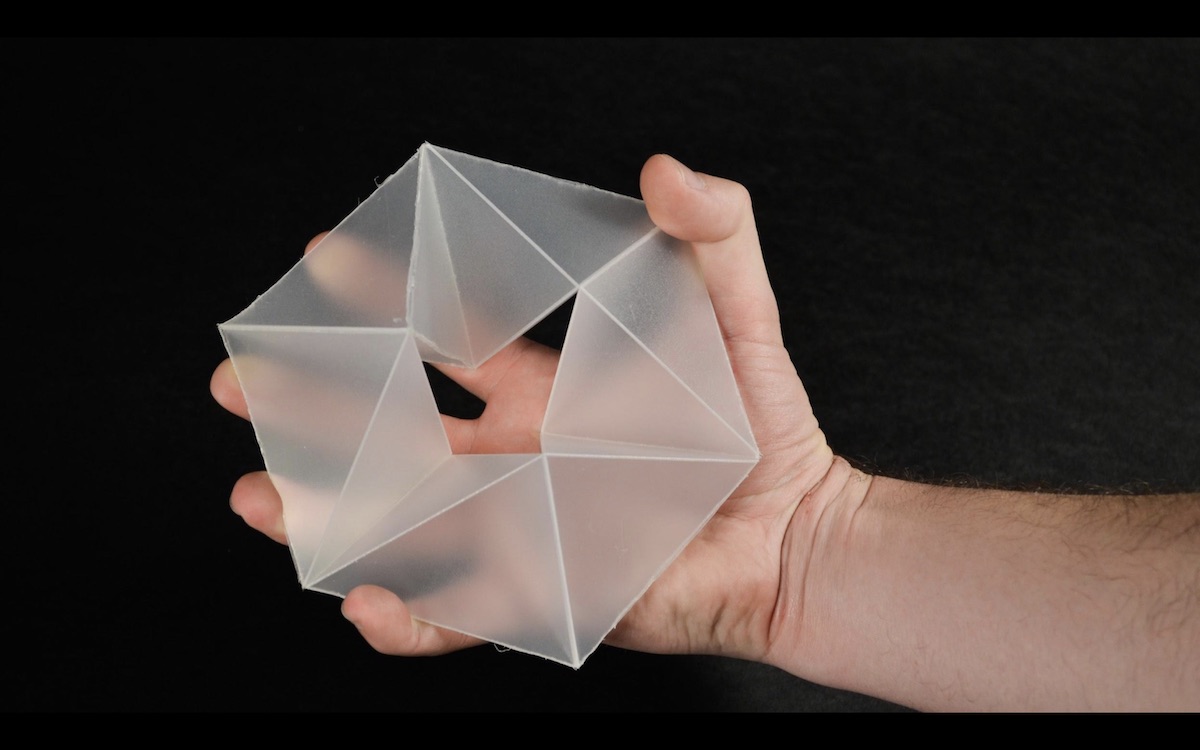
Flextangle
A uniquely dynamic exploration of polypropylene
Course: ME 219
Design Goals: Create a beautiful artifact that showcases several attributes of polypropylene. We wanted to explore polypropylene's ability to form living hinges and did so by machining grooves into its surface. The result is a stunning oragami inspired shape that can fold in on itself indefinitely, showcasing polypropylene's fatigue resistance and ability to form living hinges, its transparancy, and machinability.
Processes Employed: CNC Milling, Plastic Welding
Material: Polypropylene
Topo
A chic topographic map of the Narragansett Bay
Independent Project
Design Goals: Designed by Rachel Gianforte, this laser cut map shows the beautiful topographic features of Rhode Island's Narragansett Bay.
Processes Employed: Laser Cutting
Material: Birch Plywood
Utilitensil
A beautifully simple, robust, and lightweight camping utensil
Course: ME 325
Design Goals: Inspired by origami and living hinges, I wanted to make a tool that could lie flat and fold into shape. What developed out of that was the idea of a lightweight camping utensil with multiple uses, that could fold and snap into shape, and snap together for convenience. The end result is a beautifully simple, robust, and lightweight utensil that stores flat, but can easily snap together can be used as a spoon (~1 tsp), a fork, and a spreader. Most importantly, the utensils can stack to keep them organized and taking up less volume.
A beautifully tactile chip, enticing users to fiddle, spin, and enjoy
Course: ME 325
Design Goals: Tasked with designing the pattern on a poker chip, I wanted to create a design that felt dynamic; always changing. I was inspired by the many forms water can take: glass, ripples, waves. I settled on the idea of an Eddy or whirlpool, which would well utilize the geometry constraints, and use 3D surfacing.
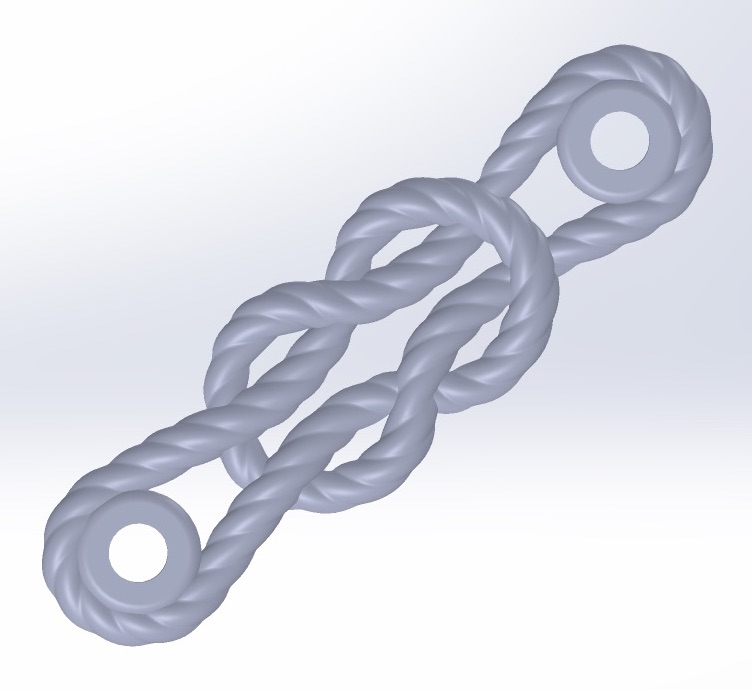
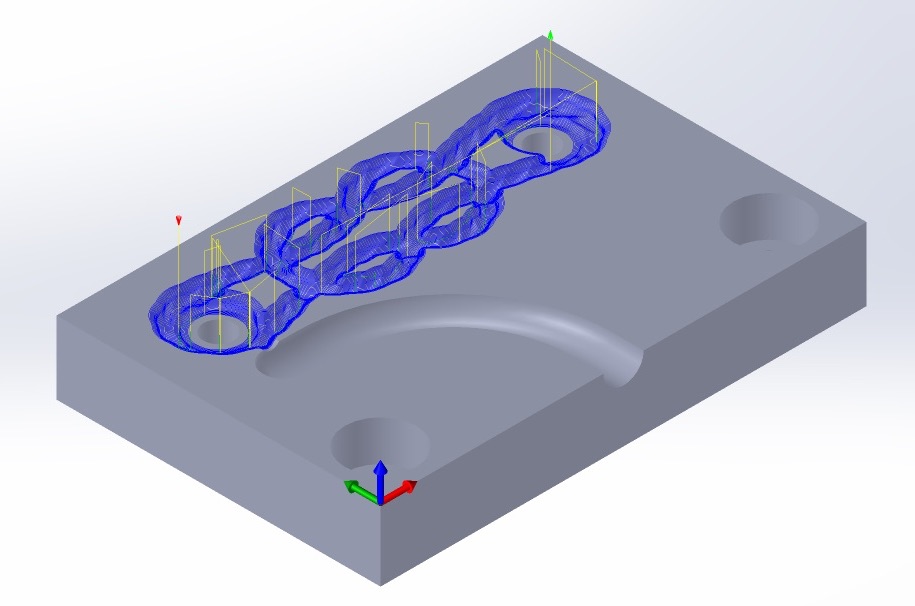
An elegantly simple knot tying two points together
Course: ME 325
Design Goals: Tasked with designing a link for a chain, I drew from my sailing experience with ropes. I settled on the square knot, a knot whose sole purpose is to connect two ropes together.
Processes Employed: CNC Milling, Plastic Welding
Material: HDPE
Stick-it
A playful suction cup to stick a marker anywhere
Course: ME 325
Design Goals: What if you could combine an EXPO marker and a nerf dart?
Design Goals: What could be made with scrap from the Torqued flexure? A wave of course.
Material: 7050 Aluminum
Kahuna
A geometric wave wall
Independent Project
Design Goals: In collaboration with Rachel Gianforte. How can you fill wall space? A wave of course.
Processes Employed: Taping, Painting
Mechatronics
An interactive mechatronic display
Course: ME 218A
Design Goals: Create an interactive display with 3 or more interactions with feedback and a way to track progress. See diagrams, schematics, and code here
Sierras
A geometric mountain wall
Independent Project
Design Goals: How can you fill wall space? Mountains of course.
Processes Employed: Taping
Joby Shy4
World's first hydrogen electric VTOL aircraft
At Joby, I architected, designed, and integrated the hydrogen powertrain integration for world’s first hydrogen-electric VTOL aircraft.
Joby S4
First of its kind eVTOL aircraft
At Joby, I designed cutting edge aerospace batteries, thermal management systems, and battery monitoring systems for the first of its kind S4 eVTOL aircraft.
Plenty Tigris Farm
An innovative automated vertical farm
At Plenty, I planned and designed automated production line cells from scratch. Additionally, I specced and programmed industrial 6 DOF Fanuc robots (R-2000iC/270F). I worked cross-functionally with Safety Compliance, Controls, and System Engineering to define end of arm tooling design. I then designed, manufactured, and integrated five-meter-long end of arm tooling for industrial robots. I also managed integrators to design and develop custom conveyance mechanisms ($1.1M contract).
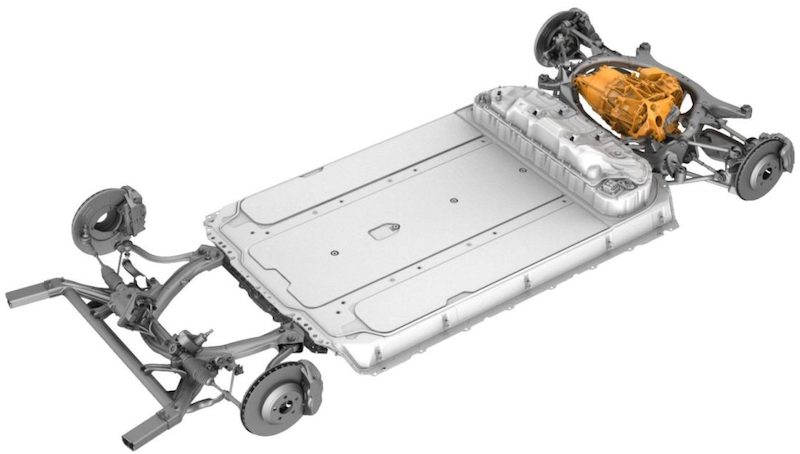
Model 3 Battery
First high volume automotive battery pack
At Tesla, I had a hand in designing 8 different parts for the Model 3 Battery pack in CATIA. Additionally, I designed components to aid the Model 3 battery automation line. I collaborated with suppliers from around the world to bring the parts to production and prototyped various designs.